学生姓名:朱宇飞
班班级级:机械2017级-07班
指导教师:马术文
毕设题目:风力发电机摆线齿轮行星减速器设计


一、概况
1.选题意义
摆线齿轮最早的应用历史是先于渐开线齿轮的,但是由于其研究理论的滞后性,导致其在范用度上落后于渐开线齿轮。但随着摆线齿轮啮合原理的不断完善,
因其具有传动比范围大、结构紧凑、可靠性高和寿命长等显著特点因而获得了广泛的青睐,对此研究也不断深入。但是因其啮合计算极其复杂以及受力分析困难,所以我国一直没有一款减速器的设计能够完全使用摆线齿轮的行星减速器传递运动,本论文的研究目的和意义就是在于找出能否设计一款完全只应用摆线齿廓设计的摆线齿轮行星减速器,将其与普通减速器做对比,分析各自的优点与适用性。
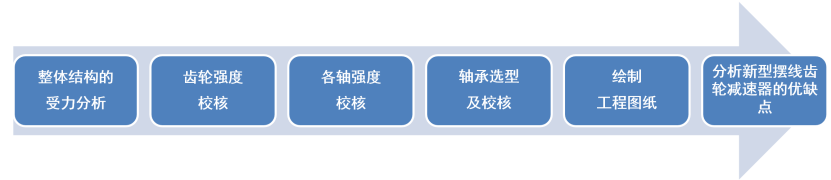
2. 任务分解
(1)查阅文献,搜集资料,文献资料搜集、整理与阅读、翻译外文文献。
(2)了解摆线齿轮及摆线齿轮行星减速器的基本结构和特点。
(3)研究齿廓方程及啮合原理,探索齿廓修形方法,设计新型齿廓,分析新型齿廓啮合曲线,设计参数等。
(4)摆线行星齿轮减速器的总体结构设计,进行各个关键零件的选型和计算并进行相关计算分析。摆线行星齿轮减速器的详细结构设计,绘制工程图纸 。
(5)摆线行星齿轮减速器的相关校核,撰写论文准备答辩。
二、已完成工作
1. 摆线的数学建模
建立标准笛卡尔坐标系,以基圆圆心为坐标原点,将发生圆一点作为固联点,设为(x,y),以滚动角度为轨迹参数角,求解它们之间的关系即为摆线轨迹方程。若将轨迹方程进行平移,又可生成外等距线与内等距线。具体建模过程如下:
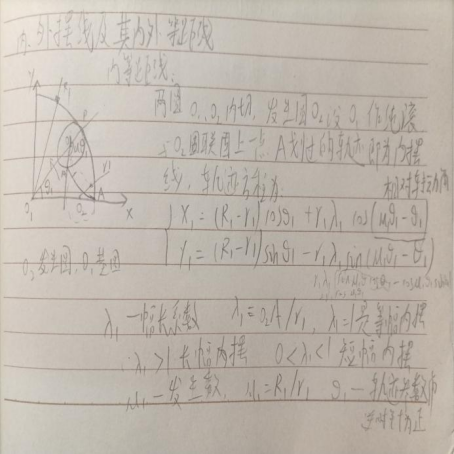
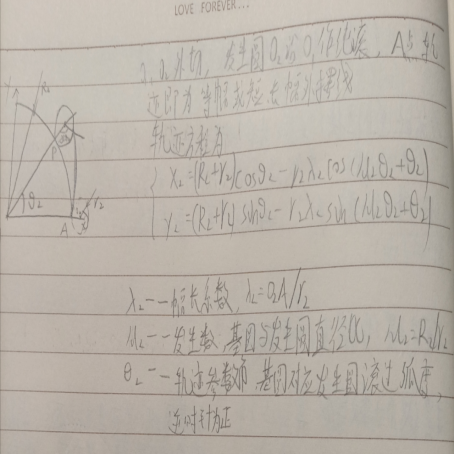
从建模过程可以看出建模的基本变量有幅长系数,决定固联点在发生圆中的相对位置;发生圆及基圆半径,决定齿廓形状的重要因素;发生数,是齿廓能否成形的关键条件。这几个基本变量即可作为后续设计摆线齿轮时的基本参数。
2. 原始齿廓连续型传动
摆线原始齿廓由内摆线和外摆线其中之一构成的有整数齿形的未经修形的连续齿廓。根据啮合原理,要使它连续型传动必须满足成形条件及共轭传动条件。
成形条件:根据齿廓方程可以得到齿廓曲率半径的最大最小值,只要等距线曲率半径满足最小值大于0即可成形。
共轭条件:传动比与公法线线段成反比。经推导得条件为:发生数,发生圆半径,幅长系数与偏移距离分别相等即可。
3. 原始齿廓重合度计算
由于齿廓啮合线为曲线,所以摆线齿廓重合度用角度来表示,设齿轮上的某轮齿从啮合开始到啮合脱离期间该齿轮转过的角度为 ,即啮合轨迹线的夹角为,齿轮齿距角为
,即啮合轨迹线的夹角为,齿轮齿距角为 ,参与啮合的半幅齿廓圆心角为
,参与啮合的半幅齿廓圆心角为 ,则摆线类齿廓的端面重合度可定义为:而原始齿廓重合度可计算为0.5,但要使得齿轮连续传动,必须满足重合度大于等于一,因此需要进行修形。
,则摆线类齿廓的端面重合度可定义为:而原始齿廓重合度可计算为0.5,但要使得齿轮连续传动,必须满足重合度大于等于一,因此需要进行修形。
4. 齿廓修形方法及新型齿廓设计
为使重合度大于等于一,根据重合度公式可以看出,重合度相关因素为某齿的转动角度,齿轮齿距角,参与啮合的半幅齿廓圆心角,因此可以采用以下途径增大重合度:
增大啮合轨迹线夹角(扩大)
增大啮合齿廓圆心角(扩大)
减小齿距角(减小)
常见修形方法如下图四种,再根据掐头、去尾、旋转、反向平移两两组合又可形成新的六种修形方法,共计十种修形齿廓,若发生圆半径无限大,幅长系数为0时,发生圆变为直线在基圆上做纯滚动,那么摆线齿廓就变成了渐开线齿廓。
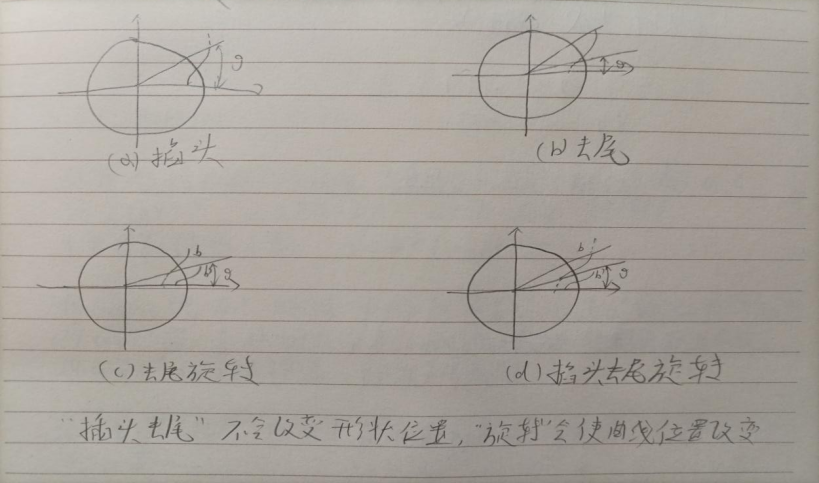
摆线齿廓常见修形方法
“掐头去尾”不改变齿廓形状位置,“旋转”会使曲线位置发生改变。
设曲线参数方程为: ,
, ,当其绕坐标系原点o顺时针旋转
,当其绕坐标系原点o顺时针旋转 角度后,其参数方程为:
角度后,其参数方程为:


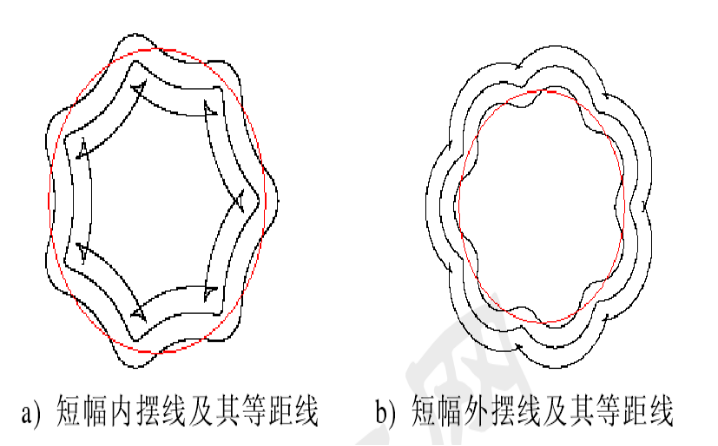
以上修形方法可以单独使用或组合运动,不改变齿廓形状,即不改变共轭的本质,所以仍相互共轭。将修形过后的摆线齿廓进行组合即可形成新型摆线齿廓。本论文选用短幅内摆线等距齿廓加短幅外摆线等距齿廓在s点处结合形成的新型齿廓进行设计和分析。
5. 新型齿廓啮合特性分析
在设计好新型摆线齿廓后就要对其啮合特性进行分析,因为内外摆线齿廓啮合点是在s点,(s点为齿廓成形时与x轴的交点)所以围绕s点设立一系列的角度值方便分析理论啮合曲线。当齿廓与齿廓啮合时,啮合点一定是两段齿廓上的公共点,因此设啮合点为(xn,yn)联立齿廓方程式,即可解出啮合轨迹线方程。
根据所求得的啮合线方程绘制啮合线图可得,摆线齿廓的啮合线为一段曲线,而极值点取为0°到一个齿的度数。但由于啮合线是曲线就会导致啮合角随着齿轮转动不断变化,导致啮合角值是一个非线性的周期变化,在后续的齿轮受力分析中会造成很大的困难(因为在计算径向力时会用到压力角),并且对应的轴承和轴的受力也会变为交变载荷,需要做疲劳校核。

摆线齿廓啮合曲线图
6. 减速器结构设计
下图为减速器成品的示意图,为达到图中所给的参数要求和结构尺寸要求,需设计合理的减速器结构以及选择合理的齿轮参数及其他结构参数。
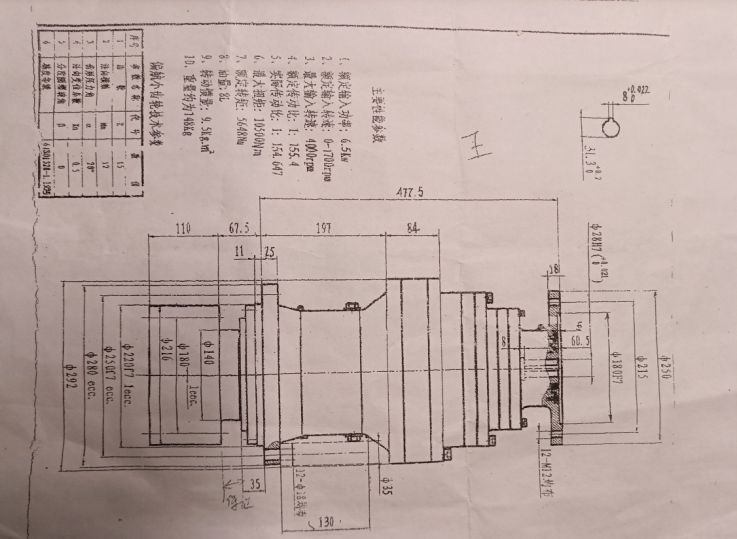
减速器成品示意图
首先是减速器结构选型,为了区分于传统的三级减速器,在马老师的指导下选用二级减速器,翻阅资料及对比3K-I型,2K-H型,3K-III型减速器结构,最终因为3K-I型减速器具有结构紧凑,受力均衡并且传动比较大还能满足输出不改变速度方向的特点,最终确定为3K-I型行星传动结构。

3K-I型行星传动简图
7. 摆线齿轮基本参数设计及选择
摆线齿轮有八个基本参数,其中的各自参数均有其各自的选择标准。发生数与修形系数的选择尤为复杂。下图是基本参数选择的条件与最终选择结果:
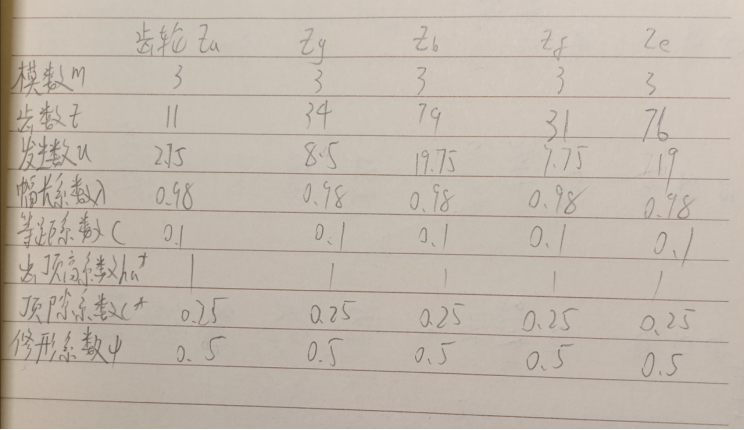
基本参数最终选择结果
8. 摆线齿轮衍生参数设计计算
摆线齿轮另有十五个衍生参数,每个参数都有对应的推导计算公式,下图所示为各个参数的计算公式以及计算结果。

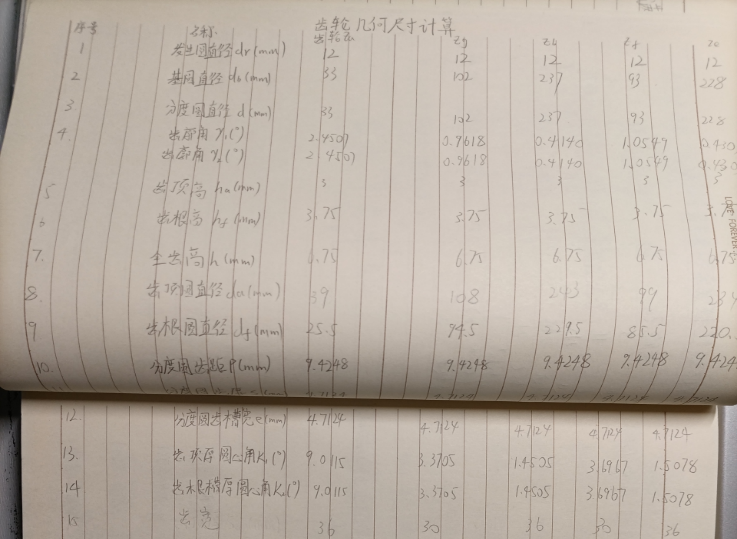
衍生参数最终计算结果
9. 三维建模
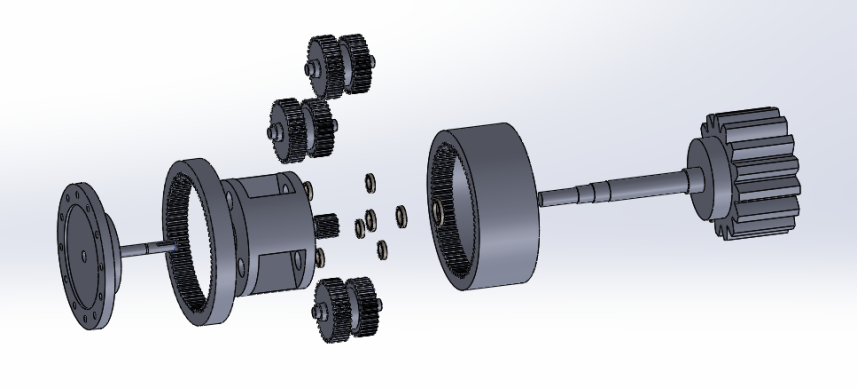
根据计算得到的齿轮参数和示意图给的要求,建立三维模型,所建立的三维模型示意图如下图所示。
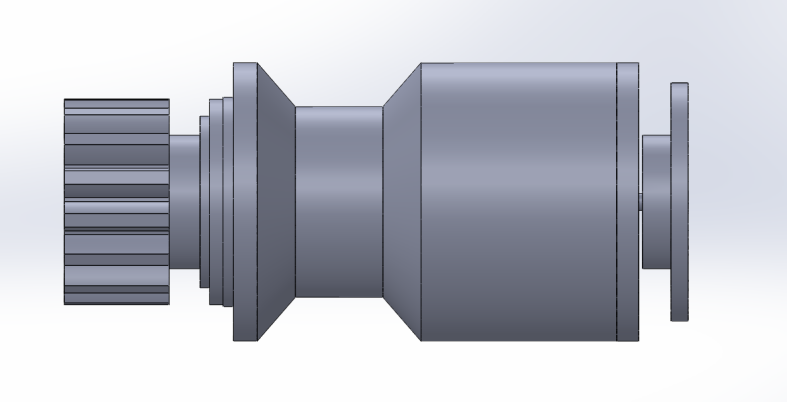
内部结构如下图所示,附爆炸视图演示。
10.运动算例输出
以要求输入轴转速为1700r,模拟仿真可初步确定满足要求。

三、下一步工作计划

问题一:毕业设计创新点在哪?
回 答:对摆线齿廓的理论研究,从原始齿廓的形成到啮合原理分析、重合度计算等,在原始齿廓的基础上进行齿廓修形和新型摆线齿廓的设计。研究新型摆线齿廓的啮合特点,计算啮合角与受力分析,分析它与普通齿廓的区别。
其次对行星减速器结构进行创新设计,区别于原始三级传动,为了发挥摆线齿廓的特点,将其设计为二级传动,采用新型结构设计。
问题二:为什么会想到这样进行设计?
回 答:首先是国内并没有一款完全应用摆线齿轮的行星减速器,马术文老师给我启发了这个方向,并且将传统减速器的示意图教给我。随着对摆线齿轮研究的深入,我发现可以运用摆线齿轮的特性选择相应的结构进行设计,也是在对比了多个减速器方案之后才最终选择了现在的方案。

从选择这个毕业设计题目到现在,首先我对渐开线齿轮和摆线齿轮有了深入而系统的了解。两种齿轮设计殊途同归,硬要说的话渐开线齿轮反而是摆线齿轮的一种特例,当摆线齿轮发生圆半径趋于无穷大时就是在做渐开线齿轮设计。我发现机械设计是一个完整的系统,它需要多方面知识的积累,涉及数学、力学、材料学和热力学方方面面,想要成为一名机械人才必须要见多识广,比如在此次毕业设计中,由于摆线齿轮在我国的理论发展还不成熟,最初我在设计时也是一头雾水,可在我翻阅大量文献之后,我对摆线齿轮才有了一定的认识,并且能发现文献中出错的地方,在阅读时也不能光看,还要经常动笔书写验算,只有好好地去动手消化一篇论文才能真正地转化为自己的东西。除了积累还需要经常实践才能积累经验,在设计时才能游刃有余。
我还要感谢指导老师马术文老师,是他带领我走进了这个领域,并且对我悉心教导和不断鼓励,我才能有勇气和信心走下去,并最终让我获益匪浅。在接下来的时间里我还会继续努力,探索的乐趣是永无止境的,我会一直保持高涨的热情研究下去。

